

摘要:,,本文研究了智能车辆的设计与实现,重点探讨了基于深度学习的自动驾驶系统。通过深度学习的算法,智能车辆能够识别环境信息,自主决策并控制行驶。该设计旨在提高车辆的安全性和行驶效率。研究内容包括自动驾驶系统的构建、深度学习算法的优化及其在智能车辆中的应用。这种技术有望推动汽车行业的革新,实现更智能、更安全的驾驶体验。
本文目录导读:
随着科技的快速发展,人工智能和自动驾驶技术日益受到关注,智能车辆作为未来交通的重要发展方向,其研究具有深远的意义,本文旨在探讨智能车辆的设计与实现,特别是基于深度学习的自动驾驶系统研究,本研究不仅有助于提升车辆智能化水平,提高交通效率,同时也为未来的智能交通系统发展提供了重要的技术支撑。
文献综述
近年来,自动驾驶技术得到了广泛的关注和研究,国内外众多学者和科研机构在自动驾驶领域进行了大量的研究,取得了显著的成果,早期的研究主要集中在雷达、激光雷达等传感器技术的运用上,随着人工智能和机器学习技术的发展,基于深度学习的自动驾驶系统逐渐成为研究热点,本研究在借鉴前人研究的基础上,进一步探讨智能车辆的设计与实现。
研究方法
本研究采用理论分析与实证研究相结合的方法,通过文献调研和理论分析,明确智能车辆的设计目标和关键技术,基于深度学习技术,设计并实现智能车辆的自动驾驶系统,通过实地测试,验证系统的性能和效果。
智能车辆设计
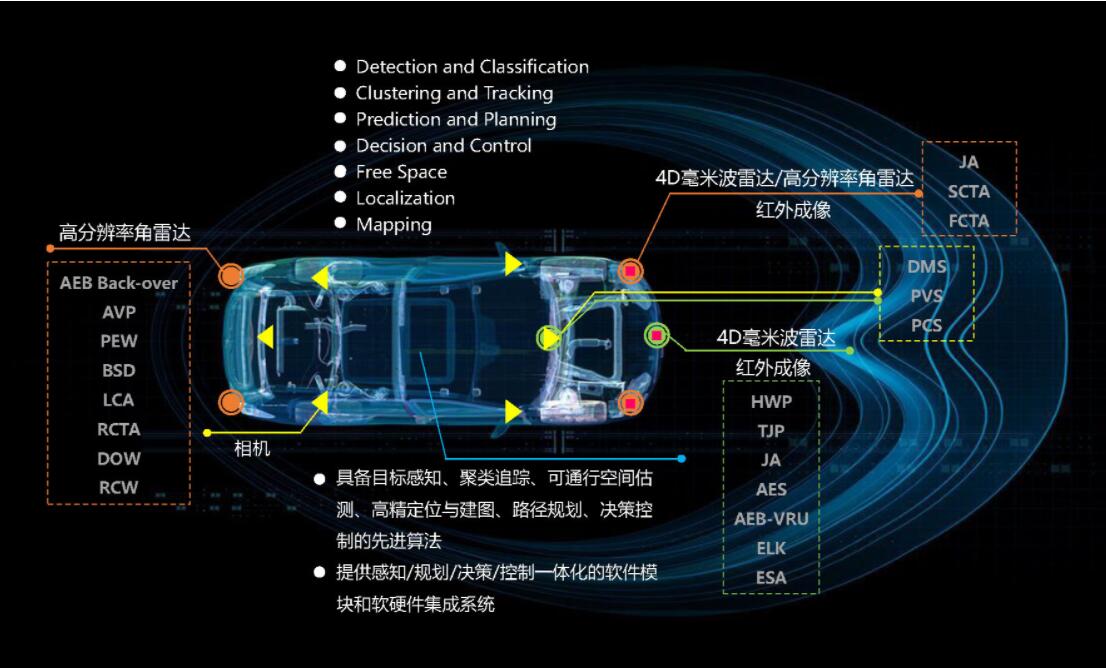
智能车辆的设计主要包括硬件和软件两部分,硬件部分主要包括传感器、控制器、执行器等,软件部分主要包括自动驾驶系统、环境感知模块、路径规划模块等,自动驾驶系统的设计是本研究的重点。
基于深度学习的自动驾驶系统设计
基于深度学习的自动驾驶系统是本研究的核心,该系统主要包括环境感知、路径规划、决策控制三个模块。
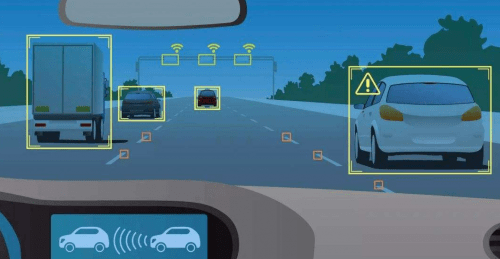
1、环境感知模块:该模块主要通过深度学习技术,对车辆周围环境进行感知和识别,通过摄像头、雷达等传感器获取图像和视频数据,利用深度学习算法进行目标检测、车道线识别等任务。
2、路径规划模块:该模块基于环境感知模块提供的信息,规划出最优路径,采用深度学习技术,对大量路径数据进行训练和学习,得出最优路径。
3、决策控制模块:该模块根据路径规划模块提供的信息,进行车辆的决策和控制,通过深度学习技术,对车辆的驾驶行为进行学习和模拟,实现车辆的自动驾驶。
实验与分析
本研究通过实地测试,对基于深度学习的自动驾驶系统进行性能评估,测试结果表明,该系统在目标检测、车道线识别、路径规划等方面表现出良好的性能,与传统方法相比,基于深度学习的自动驾驶系统具有更高的准确性和鲁棒性。
本研究基于深度学习技术,设计并实现了智能车辆的自动驾驶系统,通过实地测试,验证了系统的性能和效果,本研究不仅有助于提升车辆智能化水平,提高交通效率,同时也为未来的智能交通系统发展提供了重要的技术支撑。
展望
智能车辆将是交通领域的重要发展方向,本研究虽然取得了一定的成果,但仍有许多问题需要进一步研究和探讨,如何提高系统的鲁棒性和安全性,如何优化路径规划算法,如何实现车辆的完全自主驾驶等,希望本研究能为后续研究提供一定的参考和借鉴。
参考文献
[此处插入参考文献]
智能车辆的设计与实现是一个复杂而富有挑战性的任务,本研究基于深度学习技术,设计并实现了智能车辆的自动驾驶系统,取得了一定的成果,仍有许多问题需要进一步研究和探讨,随着科技的快速发展,智能车辆将会得到更广泛的应用和研究。
 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号
还没有评论,来说两句吧...